





焊接自动化用焊接方法连接的接头称为焊接接头,它主要起连接和传递力的作用。焊接接头由焊缝、熔合区和热影响区三部分组成,对接接头的焊前准备工作简单,装配方便,焊接变形和残余应力较小,因而在工地安装接头和不重要的结构上时常采用。
更多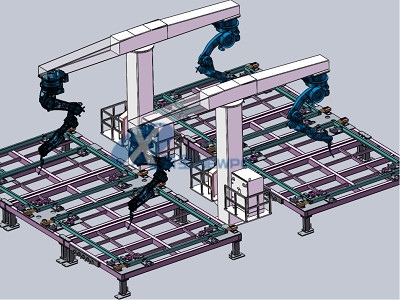

免示教编程焊接机器人与机器人行走轨道相结合时,可以实现更高效的协同作业。机器人可以根据预设的轨道和焊接路径进行自动化作业,无需人工干预和调整,大大提高了焊接作业的效率。同时,由于焊接路径和参数是自动生成的,因此也提高了焊接的精度和质量。
更多
无示教焊接机器人是一种自动化设备,它能够在没有预先编程或示教的情况下,通过学习现有焊接工人的技能和经验,自主地进行焊接工作。这种机器人的出现,可以大大提高焊接效率和质量,并且能够降低人工焊接所带来的风险和成本。
更多
免示教编程焊接机器人是一种先进的自动化设备,它能够通过机器学习和人工智能技术,自动识别和理解焊接任务,并自主完成焊接工作。这种机器人不需要人工编程或示教,而是通过机器自主学习和优化,不断提高焊接质量和效率。
更多
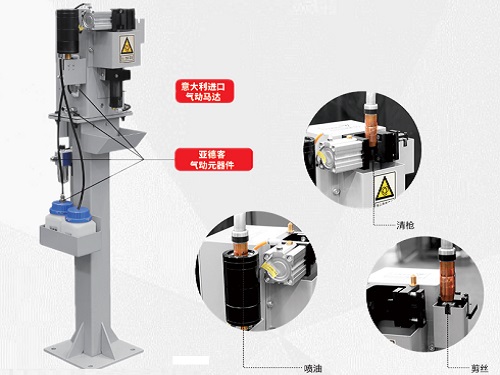
清枪器专为配有自动焊接系统的机器人焊枪及自动焊枪设计清枪站由机器人控制该设备的运行,设备也会将相应的反馈信号提供给机器人。清枪站利用铰刀旋转来从焊枪枪头及焊枪喷嘴中去除焊渣及杂质。
更多


推广焊接和切割自动化相关技术。
✓ 24小时内回复
✓ 现场调试
✓ 售后服务人员提供周到服务
✓ 官方网站: www.xbjqrkj.cn
Copyright © 2024 新宝机器人科技(南通)有限公司 All Rights Reserved | 苏ICP备19061139号

