





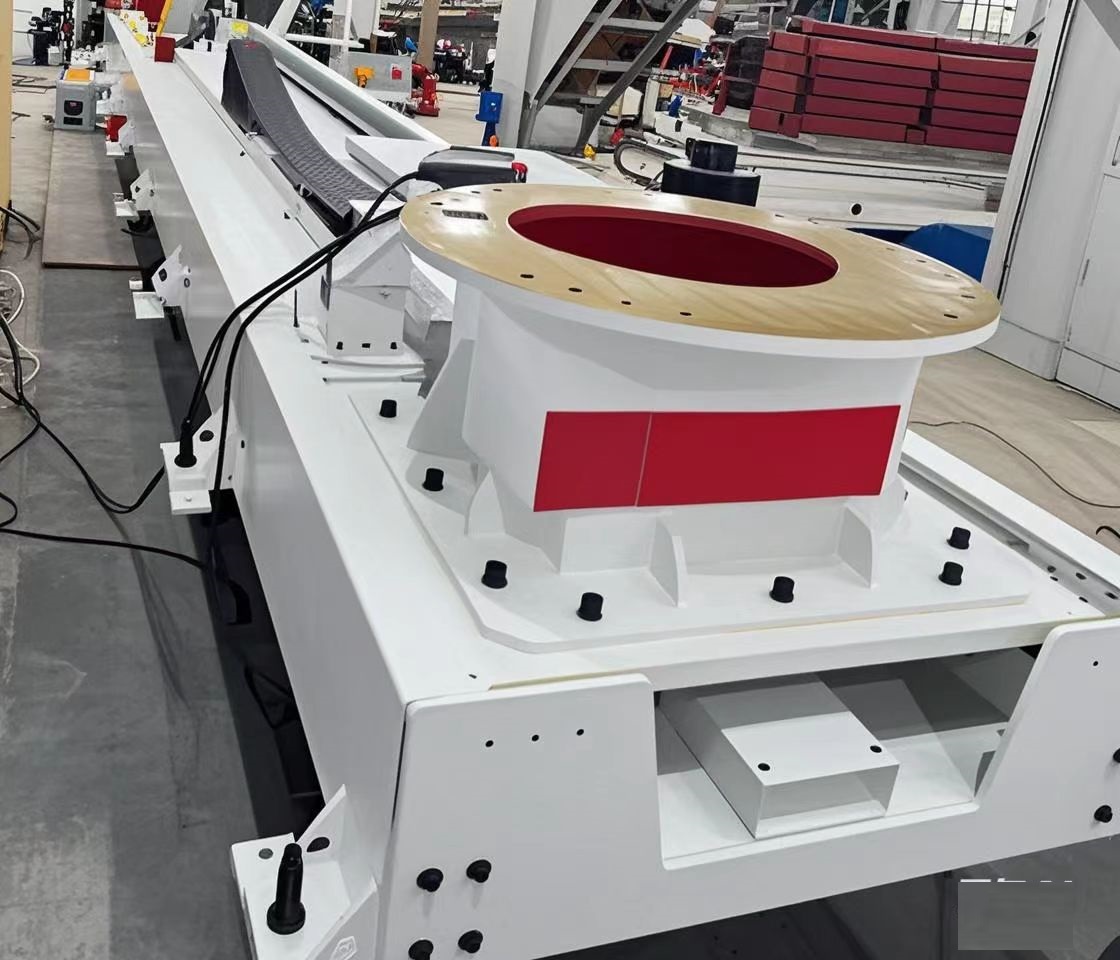
机器人外部轴一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成。即机器人本体,其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的自由度数。
更多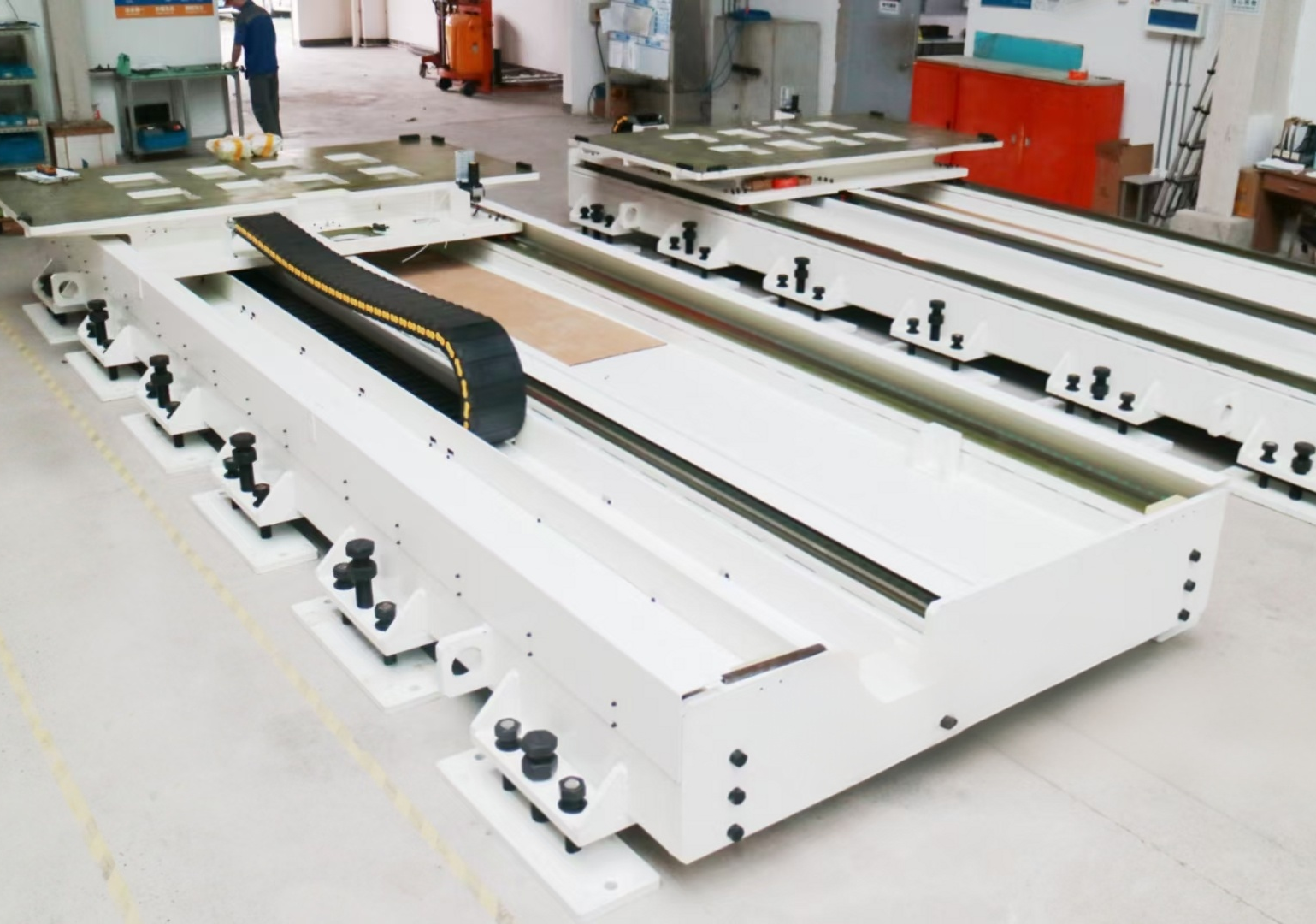
推广焊接和切割自动化相关技术。
✓ 24小时内回复
✓ 现场调试
✓ 售后服务人员提供周到服务
✓ 官方网站: www.xbjqrkj.cn
Copyright © 2024 新宝机器人科技(南通)有限公司 All Rights Reserved | 苏ICP备19061139号

