


产品详情

机器人行走轨道 机器人第七轴 机器人外部轴
机器人外部轴的发展特点:
如今机器人发展的特点可概括为:横向上,应用面越来越宽。由95%的工业应用扩展到更多领域的非工业应用。像做手术、采摘水果、剪枝、巷道掘进、侦查、排雷,还有空间机器人、潜海机器人。机器人应用无限制,只要能想到的,就可以去创造实现;纵向上,机器人的种类会越来越多,像进入人体的微型机器人,已成为一个新方向,可以小到像一个米粒般大小;机器人智能化得到加强,机器人会更加聪明
机器人外部轴的组成部分:
机器人外部轴一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成。
执行机构
即机器人本体,其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的自由度数。根据关节配置型式和运动坐标形式的不同,机器人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。出于拟人化的考虑,常将机器人本体的有关部位分别称为基座、腰部、臂部、腕部、手部(夹持器或末端执行器)和行走部(对于移动机器人)等。
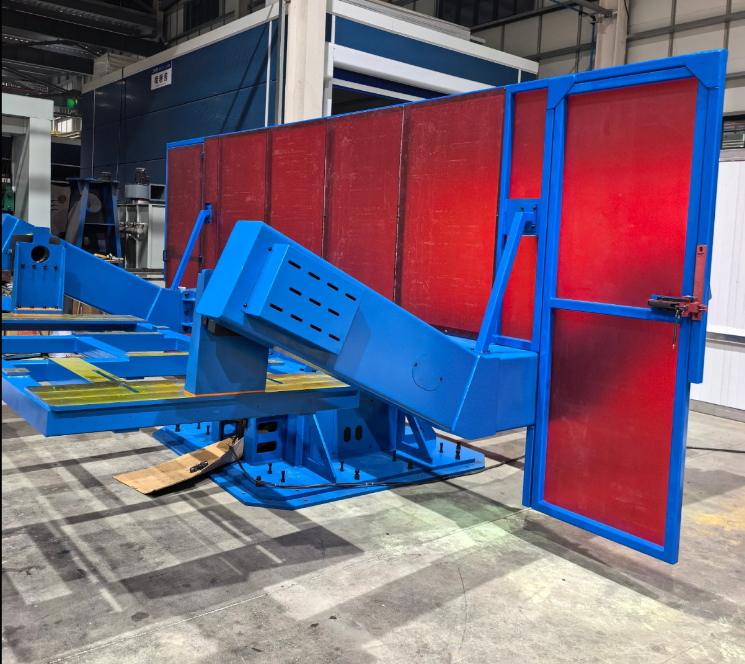
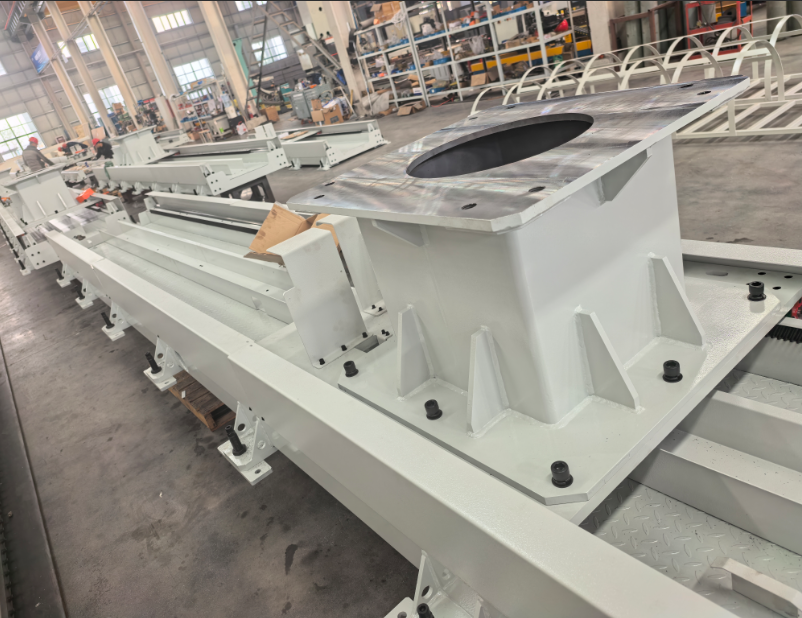
机器人行走轨道 机器人第七轴 机器人外部轴
机器人配行走轨道的主要原因是为了保证机器人在工作过程中的精准度和稳定性。相较于自由行走,固定在轨道上的机器人可以在精确的轨迹上移动,能够确保机器人的位置和方向的控制更加准确。这种方式在需要进行高精度的生产、制造、物流等任务时尤其重要。此外,配行走轨道的机器人还能够节省空间、较少设备的占地面积。因此,在很多情况下,轨道式机器人被认为是效率高、精度高、稳定性好的解决方案。
关键词:




在线咨询
推广焊接和切割自动化相关技术。
✓ 24小时内回复
✓ 现场调试
✓ 售后服务人员提供周到服务
✓ 官方网站: www.xbjqrkj.cn
Copyright © 2024 新宝机器人科技(南通)有限公司 All Rights Reserved | 苏ICP备19061139号

